面向服务架构的汽车软件开发 基础软件服务的创新方法与工程实践
随着汽车产业加速向智能化、网联化、电动化转型,传统以硬件为中心的开发模式正面临前所未有的挑战。面向服务架构(Service-Oriented Architecture,简称SOA)作为一种灵活、可扩展的软件设计范式,已成为新一代汽车软件系统的核心架构选择,尤其为基础软件服务的开发带来了革命性的方法与工程实践。
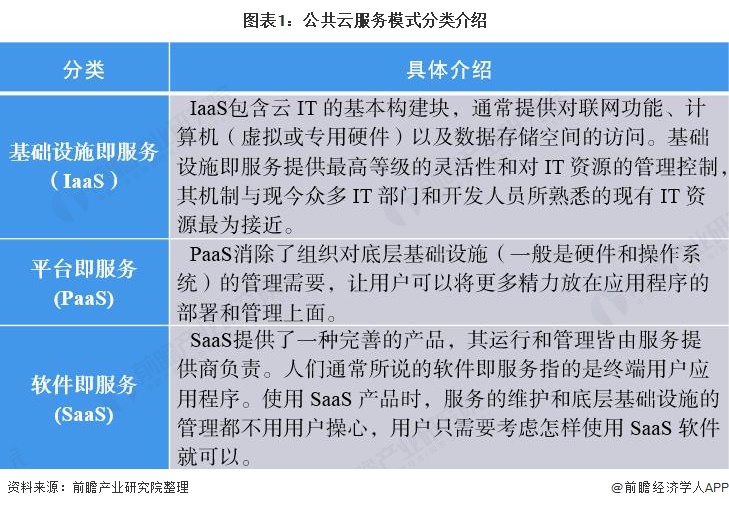
一、SOA在汽车软件中的核心价值与基础软件定位
面向服务架构的核心思想是将软件功能模块化为独立的“服务”,每个服务具有明确定义的接口,通过标准协议进行通信,从而实现松耦合、高内聚的系统设计。在汽车电子领域,SOA的引入打破了传统基于信号(Signal-Based)的静态交互模式,转向基于服务(Service-Based)的动态、按需交互。
基础软件服务在汽车SOA架构中扮演着“数字地基”的角色,主要包括:
- 操作系统抽象层服务:如POSIX兼容接口、实时性保障服务;
- 通信中间件服务:如基于SOME/IP(Scalable service-Oriented MiddlewarE over IP)的服务发现、序列化与远程调用;
- 诊断与监控服务:实现统一诊断协议(UDS)的服务化封装与健康状态上报;
- 资源管理服务:对计算、存储、网络资源的动态分配与调度;
- 安全与加密服务:提供身份认证、数据加密、安全启动等基础安全能力。
二、基础软件服务的开发方法学
- 服务建模与接口设计:采用标准化的描述语言(如Franca IDL)定义服务接口,明确服务操作、数据类型、事件及属性,确保接口的稳定性与向后兼容性。通过领域驱动设计(DDD)划分服务边界,避免过度碎片化或功能臃肿。
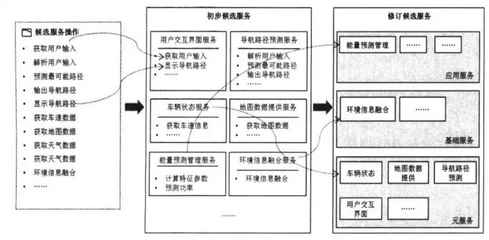
- 分层解耦与模块化:遵循“硬件抽象层(HAL)- 核心服务层 - 应用服务层”的分层原则。硬件抽象层屏蔽底层芯片与硬件差异;核心服务层提供跨域通用能力(如时间同步、日志记录);应用服务层则面向具体功能场景(如车窗控制、电池管理)。
- 异步通信与事件驱动:采用发布/订阅、请求/响应等模式,结合异步消息队列,提升系统响应性与资源利用率。通过事件驱动机制实现服务的动态响应与组合,支持功能的在线更新与扩展。
- 持续集成与自动化测试:建立基于容器的服务开发环境,实现从代码提交到服务部署的自动化流水线。针对服务接口进行契约测试(Contract Testing),确保服务间协作的可靠性;通过模拟器与硬件在环(HIL)进行集成验证。
三、工程实践与挑战应对
- 工具链标准化:采用AUTOSAR Adaptive Platform作为参考架构,利用其标准化API与工具链(如ARA::COM通信框架),降低开发复杂度。结合开源中间件(如ROS 2、Cyclone DDS)加速原型开发。
- 资源受限环境优化:针对车载ECU有限的计算与内存资源,对服务进行轻量化设计,如采用紧凑的数据序列化格式、实现服务的按需加载与休眠唤醒机制。
- 安全与功能安全合规:遵循ISO 21434网络安全标准与ISO 26262功能安全要求,实施服务级别的安全分区(如基于Hypervisor的隔离),确保关键服务(如制动、转向)的实时性与完整性不受其他服务干扰。
- OTA升级与生命周期管理:设计支持差分升级的服务包格式,实现单个服务的独立更新,并通过版本依赖管理避免兼容性问题。建立服务注册中心,动态管理服务的上线、下线与版本迁移。
- 跨域协同开发:在整车电子电气架构(如域控制器、中央计算平台)背景下,建立跨团队的服务治理委员会,统一服务接口规范、命名规则与版本策略,促进底盘、动力、座舱、智驾等不同领域间的服务共享与复用。
四、未来趋势与展望
随着中央集中式电子电气架构的普及,基础软件服务将进一步向“平台化、标准化、云原生”演进。车云协同服务(如云端算法模型下发、大数据分析反馈)将成为常态,要求基础软件服务具备边缘-云无缝协同能力。结合AI技术实现服务的自适应优化与故障预测,提升系统的智能化水平。
面向服务架构为汽车基础软件带来了模块化、灵活性与可进化性,但同时也对开发流程、团队协作与工具生态提出了更高要求。只有通过系统性的方法创新与严谨的工程实践,才能夯实智能汽车的软件基石,支撑持续迭代与用户体验的飞跃。
如若转载,请注明出处:http://www.qingwav.com/product/63.html
更新时间:2026-04-14 06:41:28